1.3.5 Vektoren
|
Man stelle sich
nun einen mit der Geschwindigkeit v rollenden Wagen vor (siehe
Abb.1), der wie ein Rollbrett nach allen Seiten frei beweglich
ist. In den auf diesem Wagen liegenden Schwamm schlage ein
Luftgewehrgeschoss mit der Geschwindigkeit u ein. Der Einschlag
des Geschosses ändert in diesem Fall auch die
Bewegungsrichtung des Wagens. Damit die Anwendung der an
eindimensionalen Bewegungen gewonnenen
|
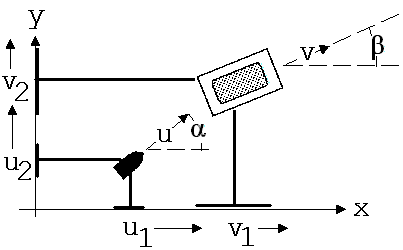
Abb.1: Draufsicht
|
Gesetze
möglich ist, werden das Geschoss und der Experimentierwagen auf
die beiden Achsen des Koordinatensystems orthogonal projiziert. Die
Projektionen bewegen sich vor dem Einschlag der Kugel in x-Richtung
mit u1 und
v1 und
in y-Richtung mit u2
und v2.
Nach dem Einschlag der Kugel bewegt sich der Wagen zusammen mit der
darin steckenden Kugel mit der Geschwindigkeit w1
in x- und w2
in y-Richtung. Der
Impulssatz gilt für beide Bewegungsrichtungen!
mG
· u1
+ mW
· v1
= (mG
+ mW)
· w1;
mG ·
u2 +
mG ·
v2 =
(mG +
mW)
· w2
Aufgabe:
Gegeben
sei mG =
0,5 g, α = 30°, u = 60 m/s und mW
= 200g, β = 20°,
v = 0,5 m/s
Welche
Geschwindigkeit und welche Bewegungsrichtung hat der Wagen nach dem
Stoß durch die Kugel ?
Zur Anwendung des
Impulssatzes müssen anhand der Angaben die Geschwindigkeiten
beider Körper in x und y-Richtung berechnet werden. Zu diesem
Zweck werden die Geschwindigkeiten vor dem Stoß durch Pfeile
veranschaulicht. Die Pfeile werden so angelegt, dass sie nicht nur
die Bewegungsrichtungen der Gegenstände, sondern auch noch mit
ihren Längen deren Geschwindigkeiten anzeigen (siehe Abb. 2).
|
Die Länge L
eines Pfeils kann z.B. gleich dem Weg sein, den ein Körper in
1 s, in 0,1 s oder in 0,01 s zurücklegt. Je nach gewählter
Zeit repräsentiert ein solcher Pfeil die Geschwindigkeiten v
= L/1 s bzw. v= L/0,1 s bzw. v=L/0,01 s. Man sollte sich den Pfeil
wie einen Zahlenstrahl skaliert vorstellen, so dass man an der
Spitze den zugeordneten Wert ablesen kann. Derartige Pfeile setzt
man immer dann ein, wenn neben der Angabe eines Maßes noch
eine Richtungsbeschreibung nötig ist, man nennt sie Vektoren.
|
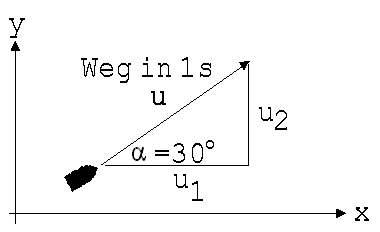
Abb. 2
|
u1 und u2
erhält man wie folgt: u1 = u · cos α; u2
= u · sin α.
Auf gleiche Weise
erhält man für den Wagen: v1 = v · cos β;
v2 = v · sin β.
Für die
Geschwindigkeiten des Wagens nach dem Stoß in x- und y-Richtung
gilt:
(mW + mG
) · w1 = mG · u ·
cos α + mW · v · cos β
(mW + mG
) · w2 = mG · u ·
sin α + mW · v · sin β
w1 = ( mG
· u · cos α + mW · v ·
cos β ) / (mW + mG ) = 0,598 m/s
w2 = (mG
· u · sin α + mW · v ·
sin β) / (mW + mG ) = 0,245 m/s
Wiederholung
zum Thema „Winkelfunktionen“
Mit
den Ergebnissen für w1
und w2
ist die Aufgabe fast gelöst.
Es fehlen nur noch Angaben über die Bewegungsrichtung und die
Gesamtgeschwindigkeit w des Wagens nach dem Stoß.
|
Zu
diesem Zweck wird der zu w1
und
w2
passende
Geschwindigkeitsvektor dargestellt Die Gesamtgeschwindigkeit w
erhält man mit Hilfe des Satzes von Pythagoras
(Herleitung
dieses Satzes)..
w1
und
w2
beschreiben
die Wege, die nach dem Einschlag der Kugel vom Wagen in einer
Sekunde in x und y-Richtung zurückgelegt werden. Der Pfeil
zeigt die Gesamtgeschwindigkeit nach Größe und Richtung
an.
|
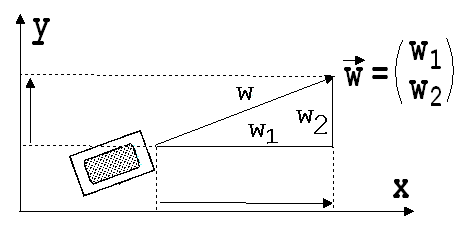
Abb. 3
|
w2
= w12
+ w22
→
 =
0,646 m/s (Betrag des Vektors w
)
=
0,646 m/s (Betrag des Vektors w
)
Die
orthogonalen Projektionen des Vektors auf die Koordinatenachsen
werden Vektorkomponenten genannt (siehe Abb.3). Die zugehörigen
Werte wie w1
und
w2
heißen
Vektorkoordinaten.
Ist
eine Komponente der Koordinatenachse entgegen
gerichtet, dann ist die zugehörende Vektorkoordinate negativ.
Die Beschreibung eines Vektors geschieht meistens mit der Angabe
seiner Koordinaten, die man normalerweise zu einer mit Klammern
eingefassten Säule (oben die x-Koordinate, dann die y-Koordinate
und schließlich bei räumlichen Vorgängen noch die
z-Koordinate), manchmal aber auch aus drucktechnischen Gründen
in einer Reihe anordnet, z.B. so:{w1 ; w2; w3}.
Aus dieser Beschreibungsform geht hervor, dass man
Vektoren dann als einander gleich ansieht, wenn sie in diesen
Koordinaten übereinstimmen. Dies bedeutet Übereinstimmung
in Richtung und Länge, nicht jedoch im Anfangspunkt.
Als Zeichen für Vektoren sind Buchstaben mit einem
kleinen aufgesetzten Pfeil oder fett gedruckte Buchstaben üblich.
Wird ein solcher Buchstabe in Betragszeichen gesetzt, dann meint man
den sogenannten Vektorbetrag. Dieser entspricht seiner Länge.
Beispiel: |w| =
 .
.
Vektorsumme und Vektordifferenz
Zu dem in der Abb. 1
skizzierten Experiment werden die Geschwindigkeiten u, v und w
angegeben. Ihnen werden Geschwindigkeitsvektoren u ={u1;
u2};
v={v1;
v2};
w ={w1;
w2}
und Impulsvektoren {mG·u1;
mG·u2};
{ mW ·v1;
mW ·v2};
{(mG+mW)·w1;
(mG+mW)·w2}
zugeordnet. {(mG + mW) ·w1;
(mG + mW) ·w2} = { mG·u1
+ mW·v1; mG·u2
+ mW·v2} wird Summe
der Vektoren {mG·u1; mG·u2}
und { mW ·v1; mW ·v2}
genannt.
|
Die
Vektorsumme zweier Vektoren a
und
b
erhält
man demnach, indem man die entsprechenden Koordinaten von a
={a1;
a2;
a3}
und b
={b1;
b2;
b3}addiert.
a
+ b
= {a1
+ b1
; a2
+ b2
; a3
+ b3}
|

Abb.4
|
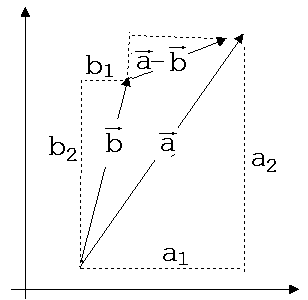
Abb. 5
|
Der
Summenvektor zeigt vom Fuß des Vektors a
zur
Spitze des Vektors b,
wenn der Fuß von b
die
Spitze von a
berührt
(siehe Abb.4). a
-
b
=
{a1
-
b1
; a2
-
b2
; a3
-
b3}
heißt Vektordifferenz. Wenn a
und
b
gleiche
Fußpunkte haben, dann stellt ein Pfeil von der Spitze von b
zur
Spitze von a
die
Vektordifferenz dar (siehe Abb.5).
Das Produkt und der Quotient eines Vektors mit einer
Zahl
Anstelle von {mG · u1; mG
· u2} und { mW · v1;
mW · v2} schreiben wir mG ·
{u1; u2} und mW · {v1;
v2}. Hieran ist erkennbar, wie das Produkt aus einem
Vektor a und einer Zahl z definiert ist.
z · a
= z·{a1
; a2
; a3}
= {z · a1
; z · a2
; z · a3}
|
Man nennt die
hier beschriebene Multiplikation eines Vektors mit einer Zahl
skalare Multiplikation. Sie bewirkt eine Streckung des Vektors a
um z (siehe Abb. 6 mit z =3).
Bei Anwendung des
Impulssatzes auf den Zusammenstoß zweier Körper mit den
Massen m1 und m2 im Raum mussten bisher drei
Gleichungen geschrieben werden:
m1·
v1 + m2 · u1 = m1
· v1’ + m2 · u1’
m1· v2 + m2 ·
u2 = m1 · v2’ + m2
· u2’
m1·
v3 + m2 · u3 = m1
· v3’ + m2 · u3’
|
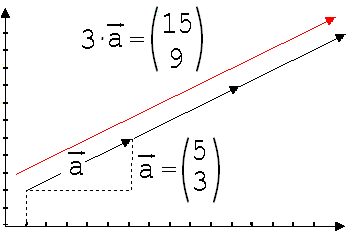
Abb.6
|
m1 ·
v1, m2 · u1, m1 ·
v1’ und m2 · u1’
sind Impulskoordinaten vor und nach dem Stoß. Für diese
drei Gleichungen kann nun die kurze Formulierung gegeben werden:
m1 ·
v + m2 · u = m1 ·
v’ + m2 · u’
v
={v1;
v2;
v3
}, u ={u1;
u2
; u3},
v' ={v'1;
v'2;
v'3
}, u' ={u'1;
u'2
; u'3}
Von nun an soll das Wort Impuls
für einen Impulsvektor m
· v
stehen.
Nach der Definition des hier beschriebenen Produkts ist
man geneigt, nach einem entsprechenden Quotienten zu fragen. Ein
Quotient a /m (Vektor a durch eine Zahl m) soll so
beschaffen sein, dass folgendes gilt: (a/m) · m = a.
(1/m) · a hat
die Eigenschaft eines solchen Quotienten.
Teilt man einen Vektor
a durch seinen Betrag
|a|, dann erhält
man einen Einheitsvektor, einen Vektor mit dem Betrag 1.
Beispiel: a = {4; 3 }; |a| =
 = 5 → a / |a| = { 4/5; 3/ 5}
= 5 → a / |a| = { 4/5; 3/ 5}
Das Skalarprodukt
|
Bei
dem in der Abb.1 skizzierten Experiment hat der Wagen vor dem
Einschlag der Kugel die Geschwindigkeit v und
nach dem Einschlag die Geschwindigkeit w.
Der Winkel γ, den
die Vektoren w und
v einschließen,
beschreibt die Richtungsänderung des Wagens infolge des
Einschlags.
Wie groß
ist γ ?
|
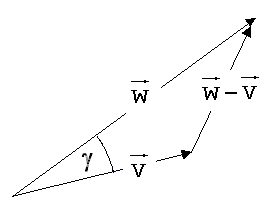
Abb.7
|
Nach dem Kosinussatz
gilt: |w-v|2 = |w|2 + |v|2
– 2·|w| · |v| · cos(γ)
Herleitung
des Kosinussatzes
(w1 -
v1)2 + (w2 - v2)2
+ (w3 - v3)2 = w12
+ w22 + w32 + v12
+ v22 + v32 - 2·|w|
· |v| · cos(γ)
↓
{w12
+ w22
+ w32
+ v12
+ v22
+ v32
}
- 2 · w1 · v1
– 2 ·w2 · v2 - 2·w3
· v3 =
={w12
+ w22 + w32 + v12
+ v22 + v32 }
-2·|w|·|v|·cos(γ)
↓
w1·v1
+ w2·v2 + w3·v3
= |w|·|v|·cos(γ) → cos(γ) = (w1·v1
+ w2·v2 + w3·v3)
/ (|w|·|v|)
w1 ·
v1 + w2 · v2 + w3
· v3 heißt Skalarprodukt w · v der
Vektoren w und v.
Unter
dem Skalarprodukt zweier beliebiger Vektoren a und
b versteht man die
Summe aus den Produkten entsprechender Koordinaten.
a · b
= a1 ·b1 + a2
·b2 + a3 ·b3
Das Skalarprodukt
gleicht dem Produkt der Vektorbeträge und dem Kosinus des
eingeschlossenen Winkels (w1 · v1 + w2
· v2 + w3 · v3 ) = |w|
· |v| · cos(γ) .
Anmerkung zum
räumlichen Koordinatensystem (Rechtssystem)
|
Die
Koordinaten eines Punktes oder eines Vektors sind normalerweise
einem Rechtssystem zuzuordnen.
Dessen
Eigenschaften sind: Die x, y und z-Achse verhalten sich ihrer
Richtung nach wie der Daumen, der Zeige- und der Mittelfinger der
rechten Hand, wenn der Mittelfinger von den beiden anderen
rechtwinklig abgespreizt ist (siehe Abb.8).
|
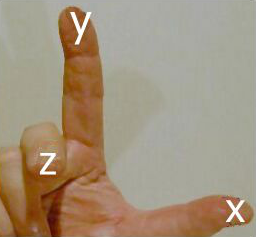
Abb.8
|