1.12.2 Das Drehmoment
Nach der Entdeckung des Impulssatzes wurde d(m·v) /dt als Maß für eine Einwirkung von außen definiert. Nun kommt auch dL/ dt als ein solches Maß in Frage. Unter einer äußeren Einwirkung erfährt ein Teilchen eine Drehimpulsänderung.
Für dL/dt gilt: dL/dt = r x F
r x F = M heißt Drehmomentvektor M
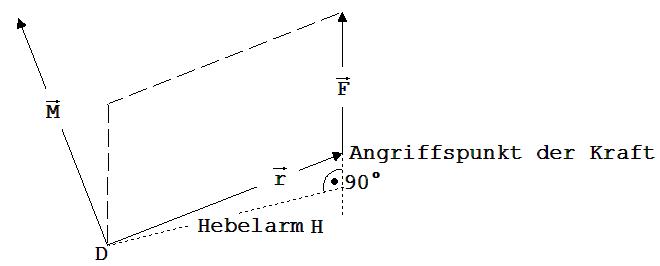
r ist der Verbindungsvektor vom Drehpunkt D zum Angriffspunkt der Kraft F. Wenn F eine Drehung verursacht, dann zeigt M die Richtung der Drehachse (siehe Abb.1).
Abb. 1
|M| = |F| · Hebelarm H (siehe Abb. 1)
Der Hebelarm H ist der Abstand des Drehpunkts vom Kraftpfeil oder dessen Verlängerung. |F| · H und |M| stehen für den Flächeninhalt des von r und F aufgespannten Parallelogramms. Liegt ein System S aus vielen Massepunkten 1, 2, 3….vor, z.B. eine rotierende Scheibe, dann nennt man die Summe der zu den Massepunkten gehörenden Drehimpulse den Gesamtdrehimpuls Lg des Systems.
Lg = L1 + L2 + L3 + ……
dLg/dt =ra x Fa + rb x Fb + rc x Fc ….. Dies ist Summe der auf das System wirkenden Drehmomente (siehe Abb.2).
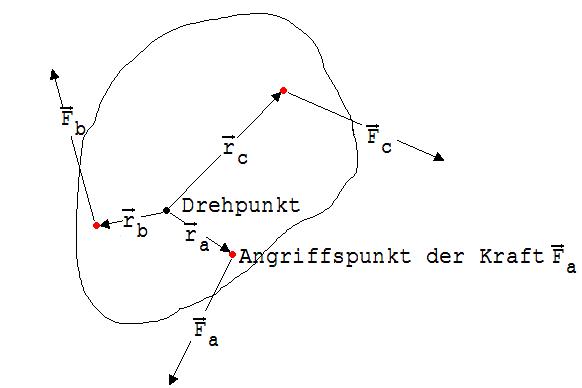
Abb. 2
Beweis:
Ein abgeschlossenes System bestehe aus den Teilen K1 bis K20 mit dem Gesamtdrehimpuls L und drei weiteren voneinander unabhängigen Teilen Ka, Kb und Kc, die mit den Kräften Fa , Fb und Fc auf K1 bis K20 einwirken . Das gesamte System hat den konstanten Drehimpuls Lg.
dLg /dt = ( r1 x F1 + r2 x F2 + r3 x F3 ….. ) + ra x (-Fa) + rb x (-Fb)+ rc x (-Fc) = 0
(-Fa) , (-Fb), (-Fc) sind die auf Ka , Kb und Kc wirkenden Kräfte.
dLg /dt = dL/dt + ra x (-Fa) + rb x (-Fb)+ rc x (-Fc)= 0
↓
dL/dt = ra x Fa + rb x Fb + rc x Fc = Mg (Gesamtdrehmoment)
↓
Eine Drehimpulskomponente Lk bleibt konstant, wenn die Komponente des Drehmoments in Richtung von Lk gleich 0 ist
Anwendungsbeispiele:
Registrierung einer Flüssigkeitsschwingung in einem U-Rohr mit Hilfe der Experimentierwippe