1.9.1 Die Harmonische Schwingung
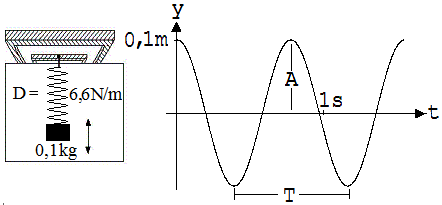
In der Abb. 1 ist eine an der Wippe aufgehängte Schraubenfeder zu sehen, die einen Körper K der Masse mK= 0,1 kg trägt. Wenn K etwas nach unten gezogen und dann freigegeben wird, schwingt er anschließend auf und ab, wobei der an die Experimentierwippe angeschlossene Rechner das in der Abb.1 sichtbare Diagramm zeichnet.
Auf die Wippe wirkt die Kraft : F = G0 + D·y. G0 ist die Gewichtskraft des ruhenden Federpendels. Um D·y ändert sich die Kraft, wenn K um y von seiner Ruhelage abweicht. Dies gilt während der Bewegung von K aber nur dann, wenn die Masse der Feder im Vergleich mit der Masse von K als vernachlässigbar klein angesehen werden kann. Eine Abweichung y nach unten erhält ein positives , eine nach oben ein negatives Vorzeichen. Das Diagramm in der Abb.1 stellt die Kraftänderungen F – G0 während der Schwingung in Abhängigkeit von der Zeit dar. Aus dem Kraft-Zeit-Diagramm wird ein Weg-Zeit-Diagramm, wenn man an die y-Achse anstelle der Kraftschwankungen F – G0 die ihnen entsprechenden Federdehnungen y schreibt.
Abb. 1
Am Körper K zieht die Feder mit der Kraft D·y + D · s. s ist die Dehnung, welche die Feder unter der Gewichtskraft mK · g des Körpers K erfährt (D · s = mK · g) . Die insgesamt K nach unten treibende Kraft setzt sich aus der auf K wirkenden Gewichtskraft und der ihr entgegengesetzten Federkraft zusammen. Fy = mK ·g - ( mK ·g + D·y ) = - D·y. Wenn die Masse der Feder im Vergleich zur Masse des Körpers K vernachlässigbar ist, dann gilt:
-D·y = m·ay → ay = - (D/m)·y
Elongation, Amplitude, Schwingungszeit und Frequenz sind Begriffe, die bei der Behandlung von Schwingungen zu hören sind.
1. Elongation y: Sie ist die augenblickliche Abweichung von der Ruhelage.
2. Amplitude A: Sie ist der Betrag der maximalen Elongation.
3. Schwingungszeit T: Dies ist die Zeit, die während einer Schwingung vergeht.
4. Frequenz f: f = n/t, n ist die Zahl der Schwingungen in der Zeit t.
Aus t = n·T folgt: f = n/(n·T) = 1/ T. Die Frequenz gibt die Anzahl der Schwingungen pro Zeiteinheit an, sie gleicht dem Kehrwert der Schwingungsdauer. Für die zugehörende Einheit 1/s schreibt man auch Hz. Dies ist eine Abkürzung vom Nachnamen des Physikers Heinrich Hertz.
Lässt man eine Kugel K in einer auf der Wippe stehenden Schale rotieren, dann wird vom Rechner ein Diagramm gezeichnet, welches man auch einer Federschwingung zuordnen könnte (siehe Abb. 2). Die Projektion P der Kugel auf die Längsseite der Wippe bewegt sich so wie ein an einer Schraubenfeder hin und her schwingender Körper. Vermutlich gilt auch für die Projektion P die Proportionalität ay~y. ay ist in diesem Fall die y-Komponente der Kreisbeschleunigung mit dem den Betrag ω2 ·r .
Die hier geäußerte Vermutung ist leicht anhand der Abb.3 beweisbar.
-ay / (ω2 ·r) = y / r → ay = - ω2·y

Abb. 2 Abb. 3
Aus ay = - (D/m)·y und ay = - ω2·y folgt:
Wenn die Winkelgeschwindigkeit der gleichförmig auf einer Kreisbahn mit r = A rollenden Kugel so gewählt wird, dass ω2 = D/m ist, dann haben P und der mit a = - (D/m)·x an der Schraubenfeder schwingende Gegenstand im gleichen Abstand vom Schwingungsmittelpunkt übereinstimmende Beschleunigungen und demgemäß bei gleichen Startbedingungen zu jeder Zeit die gleiche Auslenkung aus der Ruhelage, somit auch gleiche Schwingungszeiten T.
In der Schwingungszeit T dreht sich die Kugel K um den Winkel 2·π.
2·π/T = ω = √(D/m) → T = 2·π ·√(m/D) → f = [1/(2·π)]·√(D/m)
Eine Schwingung mit rotierendem Zeiger wird nach Anklicken dieser Zeile vorgeführt.
Elongation, Geschwindigkeit und Beschleunigung als Funktion der Zeit
Man kann eine Schwingung mit einem rotierenden Körper K beschreiben, dessen Projektion auf die Schwingungsbahn mit dem schwingenden Körper hin und her geht. Statt eines solchen Körpers K kann man auch einen mit ω = √(D/m) rotierenden Zeiger nehmen, dessen orthogonale Projektion auf die Schwingungsbahn die Elongation anzeigt (siehe Abb.5). Die Winkelgeschwindigkeit ω des zugeordneten Zeigers heißt Kreisfrequenz.

Abb. 5 Abb. 6
Wenn der mitlaufende Zeiger der Länge A den Winkel φ mit der durch den Schwingungsmittelpunkt laufenden x-Achse bildet, dann wird die Stoppuhr auf 0 gestellt. Zum Zeitpunkt t bildet der Zeiger den Winkel ω·t + φ mit der x-Achse. Für die Auslenkung y (Elongation) gilt dann:
y = A · sin(ω·t + φ); ω·t + φ heißt Phasenwinkel
Die hier aufgestellte Bewegungsgleichung gilt nur dann, wenn die beschleunigende Kraft F der Auslenkung proportional ist. Man spricht in diesem Fall von einer harmonischen Schwingung.
In der Abb. 6 ist zu sehen wie sich die Geschwindigkeit des schwingenden Körpers mit der Zeit ändert. Diese Geschwindigkeit vy erkennen wir als Vertikalkomponente der zur Zeigerspitze gehörenden Geschwindigkeit.
vy = v0 · cos(ω·t + φ); v0 = ω·A → vy = dy/dt = A ·ω· cos(ω·t + φ)
Für die Beschleunigung ay gilt: ay = - ω2·y
ay = - ω2·y; y = A · sin(ω·t + φ) → ay = dvy /dt = -A · ω2· sin(ω·t + φ)
Folgende Regeln sind erkennbar:
1. Den Differentialquotienten von einem Funktionsterm der Form „Konstante · sin(ω·t + φ)“ erhält man, indem man sin durch cos ersetzt, und den dann vorliegenden Term mit dem bei t stehenden Faktor multipliziert.
2. Differentialquotienten von einem Funktionsterm der Form „Konstante · cos(ω·t + φ) “ erhält man, indem man cos durch - sin ersetzt, und den dann vorliegenden Term mit dem bei t stehenden Faktor multipliziert.