2.8 Transformationsgleichungen für eine Drehung
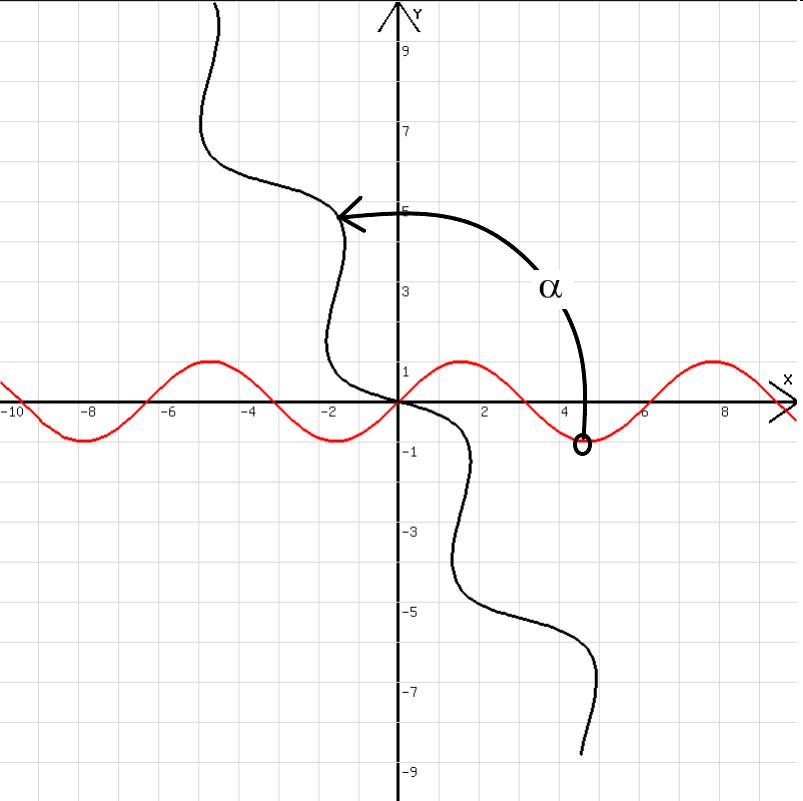
Mit der Programmzeile x=x+0,1; a=120; y=sin(x); u=x*cosg(a) - y*sing(a); v =x*sing(a) + y*cosg(a) in sim.html wird eine Sinuskurve gezeichnet und dann noch eine zweite Kurve, von der man annehmen kann, dass sie ursprünglich auf der ersten Kurve gelegen habe und dann von dieser um a=120° weggedreht worden sei (siehe Abb.1). Im Variablenfeld muss für x die Zahl -10 als Anfangswert eingetragen werden.
Abb.1
Wie führt ein Rechner diese Drehung aus ?
Mit „x=x+0,1; y=sin(x);“ wird ein Punkt (x;y) gesetzt und mit „u=x*cosg(a)-y*sing(a); v =x*sing(a)+y*cosg(a)“ wird dem Punkt (x;y) einen Punkt (u;v) zugeordnet, der sich so verhält, als ob er vom Punkt P(x;y) um 120° um den 0-Punkt des Koordinatensystems weggedreht worden sei.
Herleitung der Zuordnungsvorschrift „u=x*cosg(a) -y*sing(a); v =x*sing(a)+y*cosg(a)“
Wie können die Koordinaten (u , v) eines um α gedrehten Punktes P mit Hilfe seiner ursprünglichen Koordinaten (x; y) berechnet werden ?
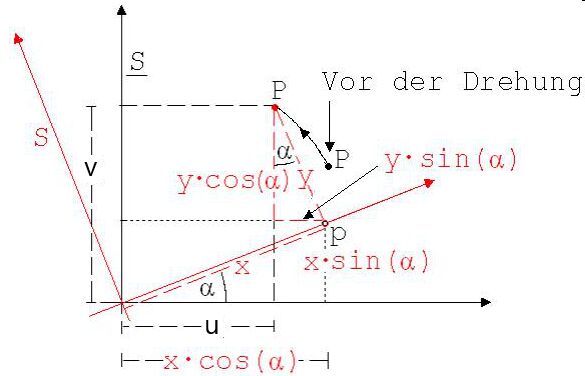
Abb. 2
Vor der Drehung gilt für P: u = x ; v = y.
P werde mit einer Kopie S des Achsensystems S um α (a) gedreht. Die x, y-Koordinaten von P in S ändern sich dabei nicht. P wird nach der Drehung um einen Winkel α auf einen Punkt p der zu S gehörenden x-Achse projiziert. Für die Koordinaten dieses Punktes p gilt:
up = x · cos(α); vp = x · sin(α)
Wie in der Abb.2 erkennbar, gilt für die Koordinaten u; v des gedrehten Punktes P:
u = x · cos α - y · sin α
v= x · sin α + y · cos α