1.11.4 Berechnung der Trägheitskräfte in einem rotierenden System mit Hilfe der Differentialrechnung
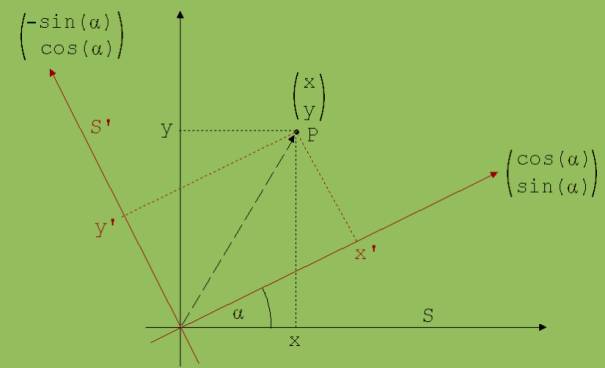
Wir stellen uns eine rotierende Ebene mit einem auf ihr festgelegten x’, y’- Koordinatensystem vor. Der Drehpunkt sei der 0-Punkt des Koordinatensystems (siehe Abb. 1). Zum Zeitpunkt t = 0 stimme das mit der Winkelgeschwindigkeit ω rotierende x’, y’-System S’ mit einem ruhenden x, y – System S überein. Zu einem späteren Zeitpunkt bilde die x’ –Achse mit der x-Achse den Winkel α = ω·t. Ein Massepunkt P mit der Masse m hat in S die Koordinaten x, y und in S’ die Koordinaten x’, y’ .
Abb. 1
Ortvektor {x;y} = r
Einheitsverktoren der x' - und y'-Achse: ex = {cos(ω·t); sin(ω·t)} und ey = {-sin(ω·t); cos(ω·t)}
Zur Bestimmung der Scheinkräfte in S' muss m·{ d2x’/dt2, d2y’/dt2} bestimmt werden.
x' = x · cos(ω·t) + y · sin(ω·t) = ex · r, y' = -x · sin(ω·t) + y · cos(ω·t) = ey · r
dex /dt = ω·{-sin(ω·t); cos(ω·t)}= ey · ω, dey /dt = - ω· {cos(ω·t); sin(ω·t)} = -ex · ω
1.)
dx'/dt = dex /dt· r + ex · { dr/dt; dy'/dt } = ey · ω· r + ex · dr/dt
dy'/dt = dey /dt· r + ey · { dr/dt; dy'/dt } = -ex · ω· r + ey · dr/dt
d2x’/dt2 = dey /dt · ω · r + ey · ω · dr/dt + dex /dt · dr/dt + ex · d2r/dt2
d2y’/dt2 = -dex /dt · ω · r + ex · ω· dr/dt + dey /dt · dr/dt + ey · d2r/dt2
↓
2.)
d2x’/dt2 = -ex · ω· ω· r + 2·ey · ω · dr/dt + ex· d2r/dt2
d2y’/dt2 = -ey · ω· ω· r - 2·ex · ω · dr/dt + ey· d2r/dt2
Die Gleichungen 1 werden nach ex · dr/dt und ey · dr/dt aufgelöst und die für sie stehenden Terme
dx'/dt - ey · ω· r , dy'/dt + ex · ω· r in die Gleichungen 2 für ex · dr/dt und ey · dr/dt eingesetzt.
d2x’/dt2 = ex · ω2· r + 2·ω· dy'/dt + ex · d2r/dt2 = ex · ω2· r + 2·ω· v'y + ex · d2r/dt2
d2y’/dt2 = ey · ω2· r - 2 · ω· dx'/dt + ey · d2r/dt2= ey · ω2· r - 2 · ω· v'x + ey · d2r/dt2
{ dx’/dt; dy’/dt } = {v'x ; v'y }
Der Beobachter in S' ordnet dem Körper mit der Beschleunigung { d2x’/dt2 ; d2y’/dt2 } und der Masse m die
Kraft F' = m·{ d2x’/dt2, d2y’/dt2 } zu.
F' = m · ω2· {x' ; y'} + 2· m ·ω· {v'y ; -v'x } + m ·{ ex · d2r/dt2; ex · d2r/dt2}
m ·{ ex · d2r/dt2, ex · d2r/dt2} ist die in S' dargestellte wirkliche Kraft F.
F' = m · ω2· {x' ; y'} + 2· m ·ω· {v'y ; -v'x } + F
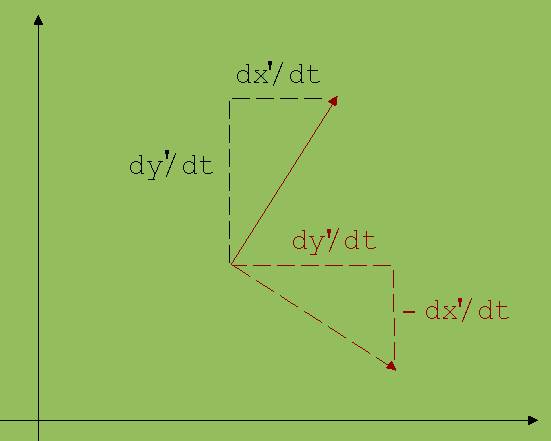
Abb. 2
2 · m · ω ·{ v’y’ ; - v’x’ } beschreibt die Coroliskraft und m · ω2 · {x’; y’} die Zentrifugalkraft.
{dy’/dt ; - dx’/dt} = { v’y’ ; - v’x’} ist ein Vektor, der durch eine Rechtsdrehung um 90° aus dem Geschwindigkeitsvektor { v’x’ ; v’y’ } entsteht. { v’x’ ; v’y’} steht für den Geschwindigkeitsvektor im System S’. {x’; y’} ist der Ortsvektor von P in S’ mit dem Betrag r. Als Beträge der beiden Trägheitskräfte (Scheinkräfte) erhalten wir: 2 · m · ω ·|v’| und m · ω2 · r.