1.9.5 Erzwungene Schwingung
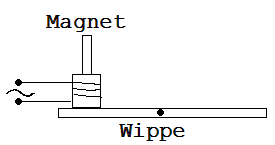
Wird eine von zwei einander gegenüber stehenden Stimmgabeln gleicher Frequenz angeschlagen, dann beginnt auch die zweite Gabel zu schwingen; sie empfängt einen Ton von der ersten und tönt zurück. Man spricht in diesem Fall von Resonanz (Widerhall). Die zweite Stimmgabel wird in diesem Fall von den Kräften einer Schallwelle, die periodisch ihre Richtung wechseln, zu Schwingungen angeregt. Das Ausmaß der Anregung ist von der Frequenz des Erregers abhängig. Vermindert man die Frequenz der ersten Stimmgabel durch Anheften eines kleinen Massestücks, dann tönt nach Anschlagen dieser Gabel die zweite weit weniger stark. Mit der im folgenden beschriebenen Anordnung soll diese Abhängigkeit von der Erregerfrequenz etwas genauer untersucht werden. Ein über der Wippe aufgehängter Magnet (siehe Abb. 1) taucht in eine auf der Wippe stehende Spule, die von einem Wechselstrom durchflossen wird, dessen Frequenz von kleinen Werten an kontinuierlich ansteigt. Der Magnet wirkt mit einer periodisch wechselnden Kraft über die Spule auf die Wippe und erregt diese zum Schwingen.
Abb. 1
Hierbei wird deutlich, dass die Schwingungsamplitude dann am größten ist, wenn die Erregerfrequenz mit der Eigenfrequenz der Wippe (10Hz) übereinstimmt (siehe Abb.2). In diesem Fall sagt man, die Wippe sei in Resonanz mit dem Erreger.
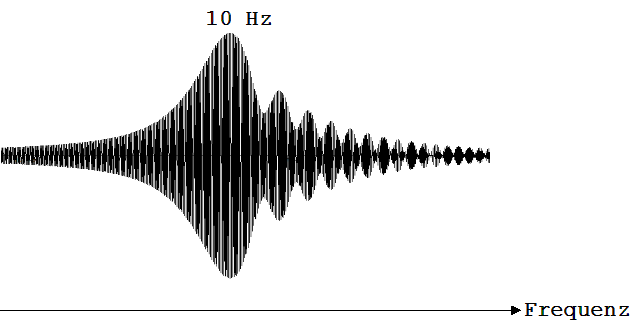
Abb. 2
Diese Resonanz wird oft als lästige Erscheinung wahrgenommen. Der Autofahrer erlebt sie manchmal als unangenehme Vibration im Fahrzeug, wenn die Reifen nicht richtig ausgewuchtet sind und infolgedessen eine Schwingung auf ein Autoteil ( z.B. das Lenkrad) übertragen, dessen Eigenfrequenz der Umlauffrequenz der Reifen gleicht.
Quantitative Untersuchung einer erzwungenen Schwingung
Zur mathematischen Behandlung der erzwungenen Schwingung stellen wir uns einen Körper der Masse m vor, der an einer Feder (Federkonstante D) schwingt. Neben der Federkraft - D·x (die Federkraft ist der Auslenkung entgegen gerichtet) erfahre dieser Körper noch eine Kraft F nach F = F0 ·sin(ω·t).
Somit gilt:
m ·a = - D · x + F0 · sin(ω·t)
Wenn noch eine von der Geschwindigkeit abhängige Reibungskraft FR = - k · v zu berücksichtigen ist, dann muss die Gleichung noch durch -k· v ergänzt werden.
m ·a = - D · x + F0 · sin(ω·t) – k·v
Mit dem nun folgenden Programm wird nach dieser Gleichung eine Schwingung berechnet und deren Elongation x in Abhängigkeit von der Zeit graphisch dargestellt.
|
Anfangsbedingungen:
|x|t|D|h|v|k|m|u|f|=|0|0|8|0.02|0|0|2|0|0|: ohne Reibung |x|t|D|h|v|k|m|u|f|=|0|0|8|0.02|0|0.1|2|0|0|: mit Reibung
wiederhole bis t>200 a = (-D*x-k*v+ 1*sin(6*t))/m b=a+(a-A)/2*f x=0.5*h^2+v*h+x v=b*h +v f=1 A=a t=t+h _t;x;;10 zurück Es kann mit „23“ und „START “ ausgeführt werden.
|
Voraussetzungen:
D = 8 N/m; m = 0,2 kg; F0 = 1N ; ω = 6 s-1 Eigenkreisfrequenz ωE des schwingenden Körpers: ωE2 = D/m → ωE = 6,32 · s-1
Anmerkungen zum Programm: Wird zur Berechnung der Änderungen von v, und x (Geschwindigkeit und Ort) während eines kleinen Zeitabschnitts h (Δt) die Beschleunigung a zu Beginn des Zeitabschnitts genommen, dann führt dies zu kleinen Fehlern, da sich die Beschleunigung innerhalb von h (Δt) ein wenig ändert. Zur Verringerung dieses Fehlers wird im Programm die Beschleunigung b in der Mitte des Zeitabschnitts h (Δt) zur Berechnung von Δx und Δv eingesetzt. Für die Änderung Δa der Beschleunigung in Δt/2 kann geschrieben werden: Δa ≈ (avor Δt – anach Δt )/2 Da anach Δt zunächst unbekannt ist, wird das zum letzten Zeitabschnitt gehörende Δa genommen. Δa = (a – A)/2 → b = a+ (a – A)/2 A = Beschleunigung zu Beginn des letzten Zeitabschnitts der Dauer h. Die Variable f (Anfangswert = 0) wurde eingeführt, damit (a – A) wegen des zunächst noch undefinierten A nicht in den ersten Rechenschritt eingeht . |
In Abb. 3 ist das vom obigen Programm für den reibungsfreien Fall (k = 0) erzeugte Diagramm zu sehen.
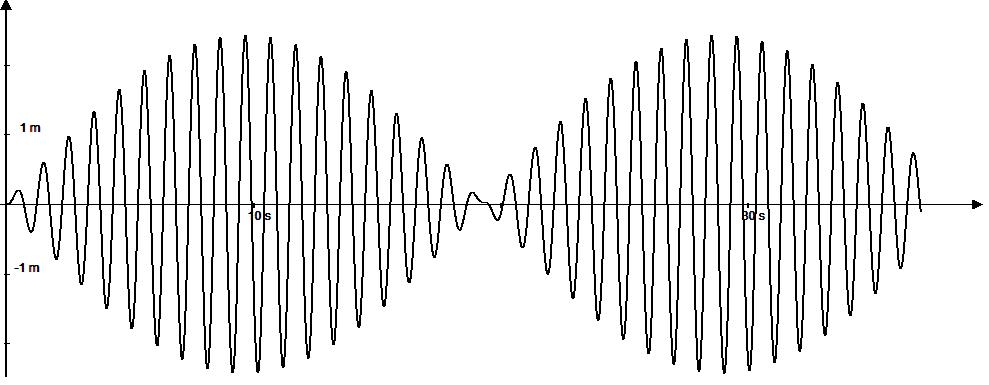
Abb. 3: x-t-Diagramm mit k=0; fE = 1Hz; f = 0,95 Hz
Dieses Diagramm beschreibt die Schwingung eines an einer Schraubenfeder hängenden Körpers mit der Eigenfrequenz fE = (1/2· π)·√(D/m) = 1Hz , dessen Schwingung von einer mit f = 6/ (2· π) = 0,95 Hz periodisch schwankenden Kraft veranlasst wird. Die Amplitudenschwankung werden im Hinblick auf die Abb. 4 verständlich. In dieser Abbildung ist neben dem v-t-Diagramm des schwingenden Körpers auch noch ein rotes Diagramm zu sehen, welches die erregende Kraft F = F0 ·sin(ω·t) in Abhängigkeit von der Zeit darstellt.
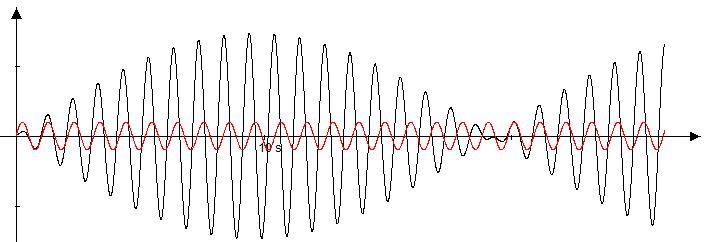
Abb. 4: t-v-Diagramm und t-F-Diagramm mit k=0; fE = 1Hz; f = 0,95 Hz
Zunächst hat F die Bewegungsrichtung (Richtung von v ), demzufolge wird der schwingende Körper fortwährend angetrieben und die Amplitude wächst. Ist das Amplitudenmaximum erreicht, dann hat die Kraft nur noch während zweier Viertelperioden die Richtung von v, folglich wird in gleichem Maß angetrieben wie abgebremst. Nach dem Maximum wird mehr abgebremst als angetrieben, weshalb die Amplitude abnimmt. Wenn die Geschwindigkeitsamplitude fast den Wert 0 erreicht hat, sind Kraft und Geschwindigkeit während der gesamten Periodendauer einander entgegen gerichtet. Hiernach erfolgt eine Umkehr der Geschwindigkeitsrichtung (Phasensprung), wonach die Kraft F = F0 ·sin(ω·t) wieder mit der Bewegungsrichtung übereinstimmt. Die Schwingung wird wieder verstärkt usw..
Wenn die Frequenz der Kraft gleich der Eigenfrequenz des schwingenden Körpers ist,wirkt die erregende Kraft immer in Bewegungsrichtung; die Amplitude wird bei fehlender Reibung unendlich groß (siehe Abb. 5).
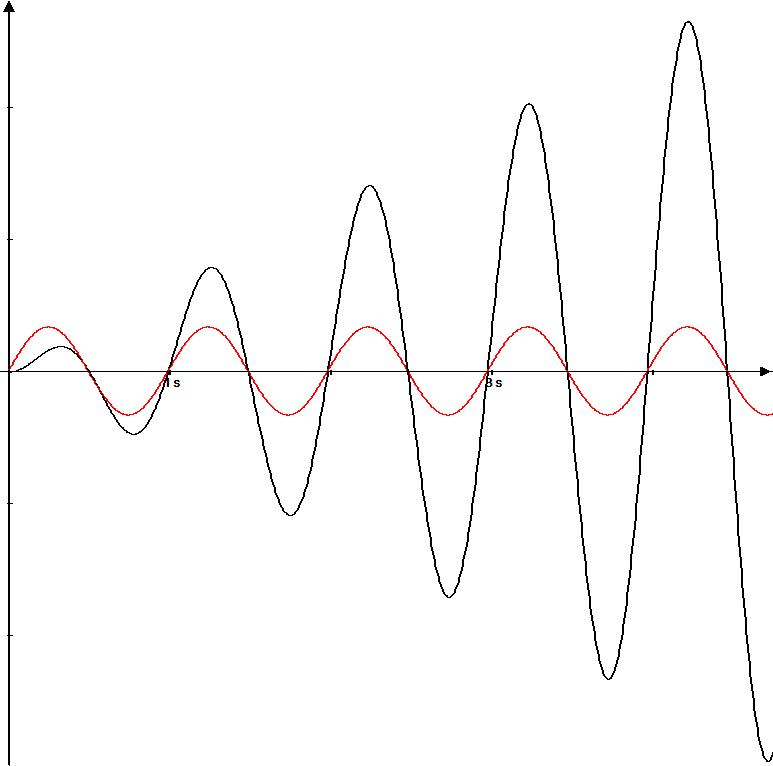
Abb. 5: t-v-Diagramm und t-F-Diagramm mit f=fE = 1Hz; k=0
Das Diagramm in der Abb. 3 gleicht einem Schwebungsdiagramm, welches die Summe zweier Schwingungen anzeigt. Die eine Schwingung ist die aufgezwungene Schwingung mit der Frequenz f und die andere ist eine Eigenschwingung mit der Frequenz fE, die sich beim Anschwingen entwickelt. Wenn Reibungskräfte im Spiel sind, dann klingt die Eigenschwingung schnell ab und die Schwankungen der Amplitude unterbleiben (siehe Abb. 6).
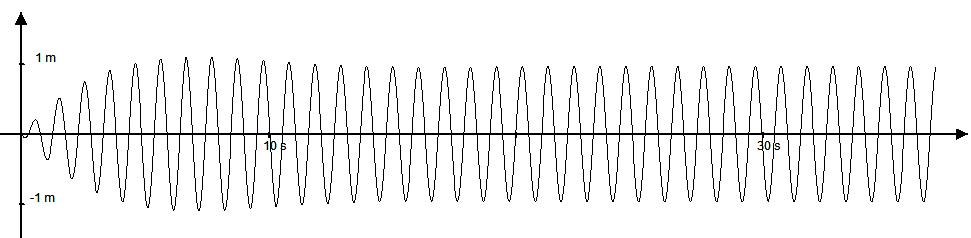
Abb. 6: x-t-Diagramm mit k=0,1; fE = 1Hz; f = 0,95 Hz
Herleitung einer Formel für die Elongation einer erzwungenen Schwingung
Das Schwingungsdiagramm zu einer erzwungenen Schwingung ohne Reibung gleicht einem Schwebungsdiagramm, weshalb die folgende Summe für die Elongation x in Frage kommt.
x = A· sin(ω · t) + B· sin(ωE ·t)
ω = Erregerkreisfrequenz, ωE = Eigenkreisfrequenz
Die Geschwindigkeit v(0) zum Zeitpunkt t = 0 ist 0. Wie im Kapitel 1.9.1 erläutert wurde, gelten für die Geschwindigkeiten v1 und v2 der Schwingung x = A· sin(ω · t) und x = B· sin(ωE ·t):
x = A· sin(ω · t); v1 = A · ω · cos(ω ·t)
x = B· sin(ωE ·t); v2 = B·ωE· cos(ωE ·t)
↓
x = A· sin(ω · t) + B· sin(ωE ·t); v = v1 + v2 = A · ω ·cos(ω ·t) + B· ωE· cos(ωE · t)
v(0) = 0 → A · ω = - B · ωE → B = - A· ω /ωE
↓
x = A· sin(ω · t) - A· (ω /ωE) · sin(ωE ·t) → x = A· [sin(ω · t) - ω · sin(ωE ·t)/ωE]
v = v1 + v2 = A· ω · cos(ω · t) -A · ω ·cos(ωE ·t);
a = dv/dt = - A· ω2 · sin(ω · t) + A · ω ·ωE · sin(ωE ·t)
Die Gültigkeit der letzten Gleichungen kann wie folgt geprüft werden:
x =A· [sin(ω · t) - ω · sin(ωE ·t)/ωE] und die zugehörende Beschleunigung a = dv/dt werden in die Gleichung m·a = - D·x + F0 ·sin(ω·t) eingesetzt.
- m·A·ω2·sin(ω·t) + m·A·ω·ωE·sin(ωE·t) =
-D·A·sin(ω·t) + D·A·ω· sin(ωE ·t)/ωE + F0·sin(ω·t)
Die fett markierten Terme heben sich wegen D = m · ωE2 auf.
- m · A· ω2 · sin(ω · t) = - D· A· sin(ω · t) + F0 ·sin(ω·t)
↓
- m · A· ω2 = - D· A + F0 → A = F0 /(D - m ·ω2) ; D/m = ωE2
↓
A = (F0/m)/ (ωE2 - ω2 )
x = A·[sin(ω · t) - ω · sin(ωE ·t)/ωE] erfüllt mit A = (F0/m)/ (ωE2 - ω2 ) die Gleichung
m·a = - D·x + F0 ·sin(ω·t).
Der Vorzeichenwechsel von A beim Übergang ω < ωE zu ω > ωE deutet nicht auf einen Phasensprung hin, wie dies oft fälschlicherweise sogar in manchen Lehrbüchern behauptet wird, denn mit A ändert auch die Differenz sin(ω · t) - ω · sin(ωE ·t)/ωE ihr Vorzeichen.
Wenn die Erregerfrequenz mit der Eigenfrequenz übereinstimmt (ω = ωE), dann nimmt nach Abb. 5 die Amplitude gleichmäßig mit der Zeit zu. Das muss aus x = A·[sin(ω · t) - ω · sin(ωE ·t)/ωE] hervorgehen, wenn wir ω an ωE heranrücken.
ω - ωE = Δ ω → ω = ωE + Δ ω
x = A·[sin(ωE · t + Δ ω · t) - (ωE + Δ ω) · sin(ωE ·t)/ωE]
x = A·[sin(ωE · t + Δ ω · t) - sin(ωE ·t) - Δ ω · sin(ωE ·t)/ωE]
A = (F0/m)/ (ωE2 - ω2 ) = (F0/m)/ [(ωE + ω ) ·( ωE- ω) ]= - (F0/m)/ [(ωE + ω ) · Δ ω]
x = [- (F0/m)/ (ωE + ω ) ]· {[sin(ωE · t + Δ ω · t) - sin(ωE ·t) ]/ Δ ω - sin(ωE ·t)/ωE}
x = [- (F0/m)/ (ωE + ω )]·{t·[sin(ωE · t + Δ ω · t) - sin(ωE ·t) / (Δ ω·t) - sin(ωE ·t)/ωE}
ωE · t = u, Δ ω·t = Δu
x = [- (F0/m)/ (ωE + ω )]·{t·[sin(u+ Δ u) - sin(u) / (Δ u) - sin(ωE ·t)/ωE}
Für ω → ωE gilt :
ωE + ω → 2· ωE
[sin(u+ Δ u) - sin(u)] / (Δ u) → cos u = cos ( ωE· t)
x = [- (F0/m)/ (2·ωE )] ·{t· cos ( ωE· t) - sin(ωE ·t)/ωE}
↓
x = [F0/ (2·ωE · m)] ·{sin(ωE ·t)/ωE - t· cos ( ωE· t)}
Ein Schüler, der mit der Differentialrechnung vertraut ist, kann mit der Regel von L'Hospital den hier gewonnenen Grenzwert ermitteln (nach ω differenzieren !) .
lim ω → ωE [sin(ω · t) - ω · sin(ωE ·t)/ωE] / (ωE2 - ω2 ) = lim ω → ωE [t · cos (ω ·t) - sin(ω ·t)/ ωE]/ (-2 ·ω )
Ist die Schwingung einer Schraubenfeder gedämpft, dann stellt sich bei einer erzwungenen Schwingung unter der Kraft F0 · sin(ω·t) ein Amplitudenmaximum ein, wenn die Erregerfrequenz f gleich der Frequenz fE = [1/(2·π)]·√(D/m) ist. fE ist die Frequenz bei fehlender Dämpfung.
Es gilt: m·a = - D·x - k·v + F0 ·sin(ω·t)
Nach dem Einschwingen kommt x = A·cos(ω·t) mit ω2 = D/m als Lösung der Gleichung in Frage.
v = -A·ω· sin(ω·t); a = -A·ω2· cos(ω·t)
-m·A·ω2· cos(ω·t) = -D·A·cos(ω·t) + k·A·ω· sin(ω·t) + F0 ·sin(ω·t)
Die fett gedruckten Terme heben sich wegen ω2 = D/m auf.
↓
k·A·ω· sin(ω·t)+ F0 ·sin(ω·t) = 0 → A = -F0 /(k· ω) → x = [-F0 /(k· ω)]·cos(ω·t)