
2.8
Transformationsgleichungen für eine Drehung
Abb. 1
Nach der Eingabe von „52“ und „START“ wird die Rotationsbewegung eines Elektromotors gezeigt.
Bei der Anfertigung des kleinen Films musste der Läufer des Motors nur in einer Stellung gezeichnet werden, denn das Bild des Läufers kann mit dem Rechner gedreht werden.
Wie führt ein Rechner die Bilddrehung aus ?
Er erfasst die Koordinaten der Bildpunkte, berechnet deren neue Koordinaten nach einer Drehung und ordnet diesen neuen Koordinaten Punkte zu. Zur Erfassung der Koordinaten wird in „Mathe.-Physik“ der Menüpunkt „Koordinaten der Bildschirmpunkte in das Tabellenfenster“ unter „Koord.“ gewählt. Um das Bild wird bei gedrückter Maustaste ein Rechteck gezogen. Ist das Rechteck vollendet, dann werden die Koordinaten in das Tabellenfenster I eingetragen. Vor dieser Maßnahme muss ein Koordinatensystem gesetzt werden (siehe „Achsensystem“ unter „Koord.“).
Zum besseren Verständnis dieses Vorgangs soll zunächst eine Zentrische Streckung durchgeführt werden. Als Urbild dient das Bild des Lehrer Lämpels aus Max und Moritz von Wilhelm Busch.
Nach der Eingabe von „11“ und „START“ erscheinen die Koordinaten des Lehrer Lämpels im
Tabellenfenster I ( x = a; y = b) von „Mathe.-Physik“.
Mit einem Doppelklick auf 2*a;2*b werden den Punkten mit den Koordinaten a;b (x;y) Punkte mit den Koordinaten 2·a; 2·b (2 · x; 2· y) zugeordnet.
Nach Ausführung der Zentrischen Streckung wird deutlich, dass zur Drehung nur eine passende Zuordnungsvorschrift fehlt.
Es stellt sich die Frage:
Wie können die Koordinaten (x; y) eines um α gedrehten Punktes P mit Hilfe seiner ursprünglichen Koordinaten (x; y) berechnet werden ?
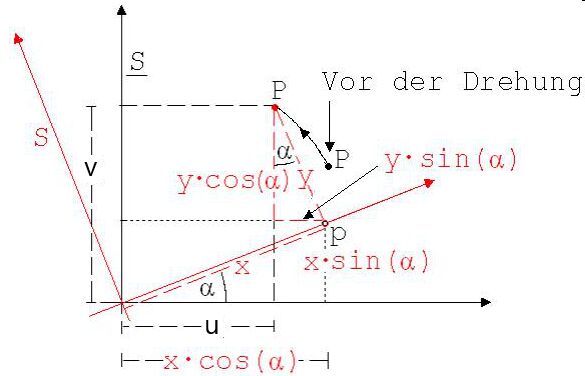
Abb. 2
Vor der Drehung gilt für P: x = x ; y = y.
Während der Drehung von P werde auch eine Kopie S des Achsensystems S um α gedreht. Infolgedessen ändern sich die x, y-Koordinaten von P in S nicht. P wird auf einen Punkt p der x-Achse projiziert. Für die Koordinaten dieses Punktes p gilt:
xp = x · cosα; yp = x · sinα
Die x –Koordinate von P ist um y · sin α kleiner und die y-Koordinate ist um y · cos α größer als die von p.
x = x · cos α - y · sin α
y = x · sin α + y · cos α
Für den Ortsvektor {x ; y } kann demnach geschrieben werden:
{x ; y } = x · { cos α ; sin α } + y ·{ -sin α ; cos α }
{ cos α ; sin α } und { -sin α ; cos α } sind Einheitsvektoren i und j , welche die Richtung der x und y Achse anzeigen.
Die Gleichung {x ; y } = x · i + y · j ist unmittelbar verständlich.
Die hergeleiteten Transformationsformeln werden nun zu einer 120° - und einer 240° - Drehung genutzt. Wieder dient der Lehrer Lämpel als Urbild. Zur 120° - Drehung wird a*cosg(120°) - b*sing(120°); a*sing(120°) + b*cosg(120°) über die Tabelle der Koordinaten geschrieben und doppelt angeklickt . a und b entsprechen x und y, das g hinter sin und cos zeigt dem Rechner an, dass mit Altgrad gearbeitet wird.
Nach Eingabe von „53“ und „START“ kann die Drehung ausgeführt werden.